The Rise and Fall of the Lunar Module: a Problem?
Or More Intentional Errors in the Apollo Record?
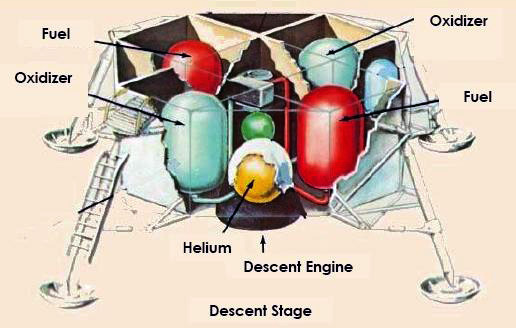
Descent Stage
When it came to accessing the lunar surface the lunar module (LM) had a powerful descent engine designed for landing on the Moon. It also had two fuel tanks and two oxidizer tanks placed symmetrically in relation to the descent engine.

The LM descent engine had been designed so that it could be throttled. This was an absolute necessity, as its thrust had to be adjusted during the powered descent. At the beginning of its descent manoeuvre it had to run at maximum thrust which was progressively decreased during its descent to the lunar surface. By the time the LM was just above the surface, the thrust had to reduce to around a third of its maximum power and as the LM navigated towards its landing site while using up the remaining fuel, this needed constant adjustments.

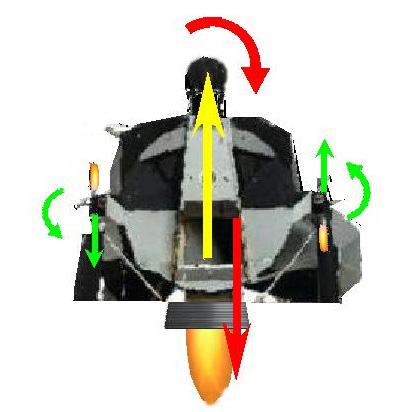
The engine also had a gimballing system which allowed changes to its orientation during its descent to the lunar surface.

The vectoring capability of the descent engine permitted the LM’s direction of the thrust to be maintained and aligned with the centre of mass. This was continually adjusted as the fuel/ oxidizer level in the tanks reduced in order to avoid any misalignment of torque. Any such misalignment would be unacceptable as it would induce spin on the LM.

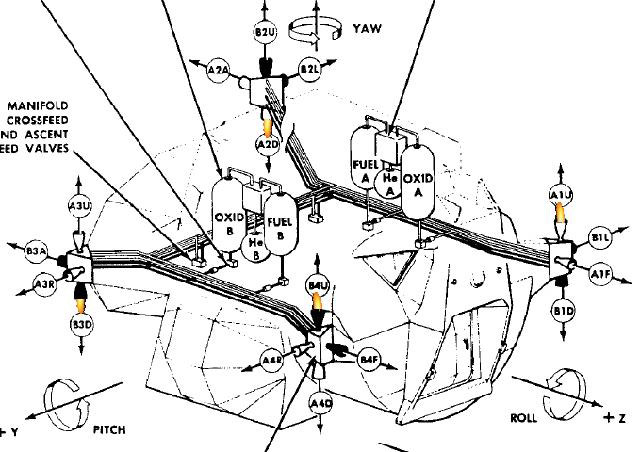
The LM was also equipped with a set of lateral thrusters consisting of four groups of four lateral thrusters each, located at the four corners of the module. These lateral thrusters enabled the three essential manoeuvres and translations of rotation: pitch, roll and yaw.

Each cluster had two vertical thrusters directly opposed to each other, and two horizontal perpendicular thrusters. Unlike the descent engine, these thrusters could not be throttled, they were either fully 'on' or fully 'off'.

Ascent Stage
The LM's ascent stage also had its own engine. It had a single oxidizer tank and a single fuel tank.
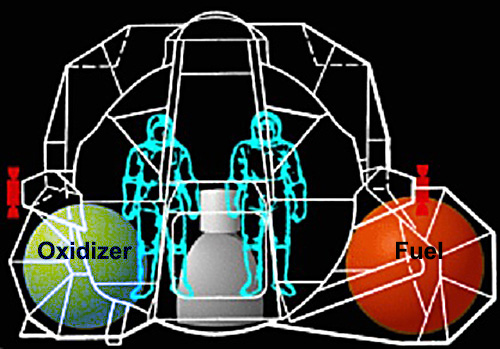
Unlike the descent engine, the ascent engine was fixed, and could not be vectored. Therefore it was not possible to change its orientation in order that the line of thrust would remain aligned with the centre of mass, which was moving along the path of ascent. The oxidizer had a density which was one and a half times greater than the fuel, so to avoid any imbalance at lift-off, the fuel tank was located farther from the ascent engine than was the oxidizer tank.
But after take off, as the level of these two tanks reduced, the centre of mass progressively shifted toward the fuel tank, and since the ascent engine could not be vectored this created an ever increasing misalignment torque.
The only way to counter this torque misalignment was to use the lateral thrusters to create a counter, opposing torque. However, these lateral thrusters could not be used constantly but only fired for short bursts. Furthermore, they could not be throttled and thus they were unable to create a counter torque equivalent to the misalignment torque.

As a consequence of the above, the erratic 'roller coaster' trajectory of the LM ascent stage could not be avoided. See also the studies of this phenomena in Anomalous Apollo 17 Trajectory and the Apollo 17 Liftoff.

As the misalignment increased during the powered ascent (due to the reducing tank levels) the amplitude of the anomalous movement also increased. But if the misalignment torque became stronger than the counteracting torque that the lateral thrusters were able to apply, the LM could not complete its powered ascent, and it would inevitably crash down onto the lunar surface.

This amplitude variation was already significant at the beginning of the powered ascent (which lasted for more than seven minutes) and the ascent trajectory of the Apollo 17 LM was to become increasingly erratic. This behaviour is correctly depicted in the TV broadcast recording created to illustrate the LM ascent stage as discussed in the Anomalous Apollo 17 Trajectory.

Diagram illustrating the change of attitude of the LM during its trajectory just above the lunar surface. Both CSM and LM are travelling counter-clockwise and the image is read from right to left.
Descent and Ascent details
During its powered descent, the module started in a horizontal orientation, as it had to first push with the thrust of its engine to decrease its horizontal speed. Then, during the descent, the LM was progressively adjusted towards a more vertical attitude to finish in a fully vertical position as it neared the lunar surface.
As already stated, the descent engine was at maximum thrust at the beginning of the powered descent, then during the descent the thrust progressively decreased and when the module approached the lunar surface, the engine was throttled back to around a third of the maximum thrust to counter the lunar attraction. During this last phase the engine's thrust had to be constantly updated as the module lost weight in order to remain at a constant altitude over the lunar surface.

Diagram illustrating the change of attitude of the LM during its ascent trajectory.
On its return to the orbiting command and service module (CSM), the process was inverted. The LM ascent stage took off from a vertical position, and progressively turned towards the horizontal as it ascended until it reached its required orbit and became fully horizontal. The ascent stage drew progressively closer to the CSM by applying Hohmann transfer orbits (an elliptical orbit used to transfer between two circular orbits of different radii).

In the video that was created to show the ascent of the Apollo 17 LM we see the ascent stage turn into a horizontal attitude – called the “pitchover". But this particular manoeuvre is a very gradual and progressive change to a horizontal attitude, and should not in fact have occurred either so rapidly or so abruptly as is portrayed in the TV broadcast recording.

As for guidance, the LGC (Lunar Module Guidance Computer) could automatically set the engine 'on' or 'off' (something the astronauts could also do manually with the engine start/stop button) with ENGINE ON and ENGINE OFF commands. See Lunar Module Descent and Landing: Intentional Errors Introduced into the Record?

The AGC (Automatic Gain Control) had access to the commands ENGINE ON and ENGINE OFF through two bits in Channel 11. Writing a 1 in the bit 13 of this channel allowed an ENGINE command, and writing a 1 in the bit 14 of this channel allowed an ENGINE OFF command.
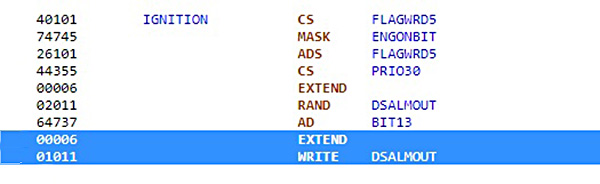
The instruction to write in this channel was to be used only once in the program, "Burn Baby Burn", with a channel identified as "DSALMOUT".
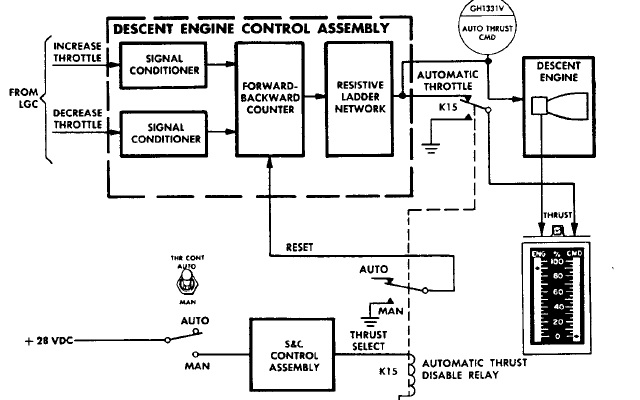
The thrust was adjusted as described in the LM technical manual. The INCREASE THROTTLE and DECREASE THROTTLE commands were inputs to a counter; the INCREASE THROTTLE command allowed increments to the counter, and the DECREASE THROTTLE command allowing throttling back to the counter. The output of the counter allowed control of the thrust of the engine when it was the LGC which controlled the thrust (when the engine control mode was on AUTO).

Sending a pulse on the INCREASE THROTTLE command permitted increments to the counter, and thereby increased the thrust of the engine. The Apollo documentation states that each pulse on INCREASE THROTTLE increased the thrust by 2.7 pounds.

Conversely, sending a pulse on the DECREASE THROTTLE command permitted reduction to the counter, thereby decreasing the engine thrust. The documentation states that each pulse on DECREASE THROTTLE decreased the thrust by 2.7 pounds.

Therefore, increasing the thrust was achieved by sending trains of pulses on the INCREASE THROTTLE command, while decreasing the thrust was done by sending trains of pulses on the DECREASE THROTTLE command. The maximum thrust of the main descent engine was 9900 pounds, and the minimum thrust was 1280 pounds.
So, if each pulse on the INCREASE THROTTLE and the DECREASE THROTTLE commands resulted in a variation of 2.7 pounds of the thrust it means that the thrust could be adjusted by (9900-1280)/2.7 = 3192 steps. This could be achieved with a command of 12 bits (12 bits represent a value of 4096).
This means that there should have been an output channel of the AGC on which 12 bits are reserved for the control of the thrust.
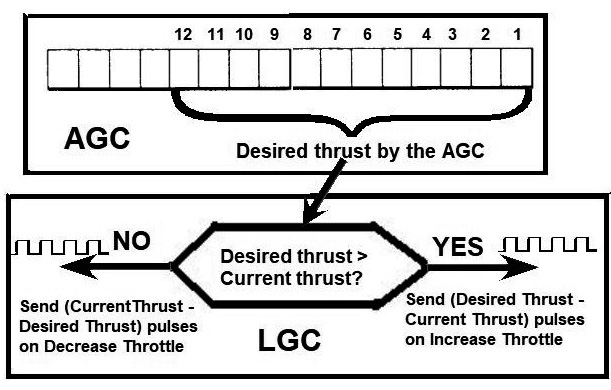
When the AGC wanted to set a desired level for the thrust, it would write the corresponding level on 12 consecutive bits of a dedicated channel. The LGC would then use this desired thrust to compare it with the current thrust:
– If the desired thrust was greater than the current thrust, the LGC would send (Desired thrust - Current thrust) pulses on the command INCREASE THROTTLE to increase the counter controlling the thrust by this value.
– If the desired thrust was smaller than the current thrust, the LGC would send (Current thrust - Desired thrust) pulses on the command DECREASE THROTTLE to decrease the counter controlling the thrust by this value.
This way the current thrust would be maintained equal to the desired thrust of the AGC.

But, if you examine all the channels used by the AGC, you can see that there was no channel which allowed the AGC to control the thrust of the main engine, either by the way which has been explained, or by bits which would allow to send positive pulses to the INCREASE THROTTLE command, and negative pulses to the DECREASE THROTTLE COMMAND.

Yet, the 12 bits preceding the bits of the ENGINE ON (bit 13) and the ENGINE OFF (bit 14) could perfectly well have been used by the AGC to specify the desired level of thrust. Instead, these bits were only used for indicator lights.
The powered descent could have been done without these light indicators, but it could not have been done if the AGC could not control the thrust of the main engine (the thrust was set at maximum at the beginning of the powered descent, and decreased after the braking phase; and, when the LM was moving over the lunar surface in order to find a spot to land on, the thrust was continually adjusted to compensate the lunar attraction, as the weight of the lunar module decreases).
Significantly, there are are plenty of spare bits in other channels that could have been used for these light indicators.

The conclusion therefore is that the thrust of the main engine could not have been adjusted by the AGC, which made the powered descent impossible.

The clusters of lateral thrusters were located on the four corners of the LM, each rotation command or translation command would need four thrusters. The following schematic shows how the lunar module could be pitched up by firing the thrusters A4D, B1D, A3U, and B2U.
This schematic shows how the the module could be pitched down by firing the thrusters B4U, A1U, A2D, and B3D.
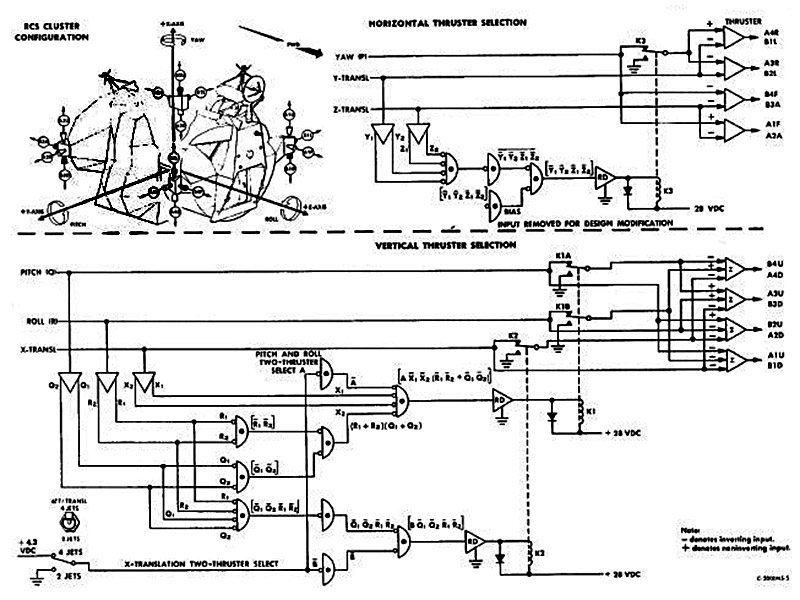
This is the schematic of the logical command interface of the RCS (reaction control subsystem), as shown in the Apollo Operations handbook of the LM. This interface uses electromechanical relays which were totally unnecessary to make it function.
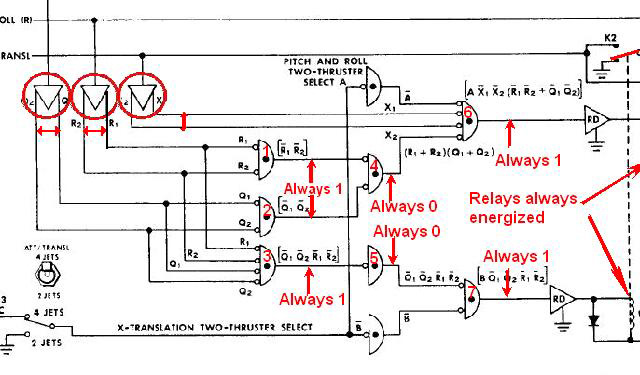
If we look at how the electromechanical relays were connected in the vertical thruster selection, we can see that they were connected in such a way that, whatever the inputs of the interface, these relays were always pulled to the ground, and therefore totally useless.

Likewise, if we look how the electromechanical relays were connected in the horizontal thruster selection, we can see that they were connected in such a way that, whatever the inputs of the interface, these relays were also always pulled to the ground, and again totally useless.
Moreover, each vertical command activated two vertical thrusters, and, if we look at the references of these thrusters, we can see that these were two groups of systematically vertical thrusters directly opposed to each other on the same cluster, thereby cancelling out their respective effects.

How could the RCS possibly work when each command of the lateral vertical thrusters activated two vertical thrusters directly opposed to each other on the same cluster, thereby canceling out their mutual effects?
Therefore the LM was unable to control its attitude, rendering both the powered descent and ascent impossible (while unable to compensate the torque misalignment with the lateral thrusters).
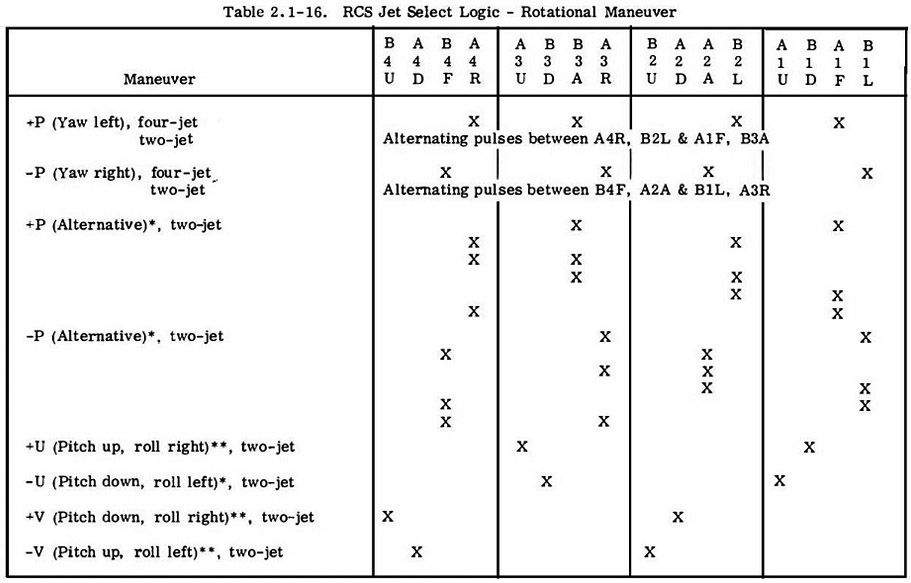
This is a table of less aberrant rotational manoeuvres, as each vertical command doesn't activate opposing thrusters on the same cluster, but on two diametrically opposing clusters. Although this table apparently contradicts the schematic we saw earlier, there is still a major problem even if it seems more coherent than the preceding schematic.
Each command acted on both the pitch and the roll. According to the table below, it was impossible to pitch without rolling and vice versa. In fact pitching without rolling, or rolling without pitching, could not be done with just two thrusters. Four thrusters were required, as we have seen above.

There should have been a channel with 12 bits to send commands for controlling the RCS to the LGC –
- A bit to send a pitch command, and a bit to send the sign of the pitch command.
- A bit to send a roll command, and a bit to send the sign of the roll command.
- A bit to send a command of vertical translation, and a bit to send the sign of this vertical translation.
- A bit to send a yaw command, and a bit to send the sign of this yaw command.
- A bit to send a translation along the Y axis, and a bit to send the sign of this command.
- A bit to send a translation along the Z axis, and a bit to send the sign of this command.
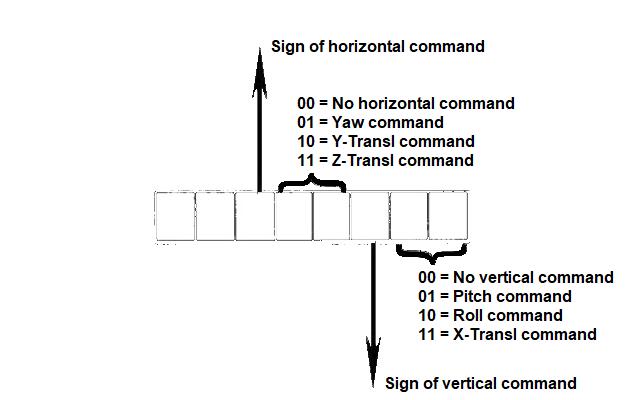
If we consider that only a vertical command could be sent at any given moment, and only a horizontal command at any given moment, there would have been two bits to specify the type of vertical command , and one bit to specify the sign of this vertical command, and two bits to specify the type of horizontal command, with a bit for the sign of this horizontal command. That would have been two fewer bits to send commands for controlling the RCS to the LGC. However, it appears that the LGC had not provided this facility.

In fact, there were two channels for controlling the RCS, with eight bits on each of these channels, which means that there were 16 commands sent to the LGC for controlling the RCS instead of 12.
Rather than sending the normal commands of rotation and translation (three commands of rotation, either positive or negative, and three commands of translation, either positive or negative), these channels would allow to control the 16 thrusters of the RCS, something the LGC did not permit. It would make no sense for the AGC to independently control the 16 thrusters of the RCS, for nothing would prevent it from activating thrusters which were incompatible.

For example, by setting the 8 bits of the two channels 5 and 6 it would activate all 16 thrusters of the RCS, which would mutually cancel out their effects (for they each had the same thrust); the result is that the lunar module would not react as required to these thrusters, while at the same time waste propellant of the RCS. That demonstrates how absurd it would be for the AGC to individually command the thrusters of the RCS, without control from the LGC.

Moreover, the routine which controls the attitude of the lunar module (ATTITUDE_ MANEUVER_ ROUTINE) does not even write in these channels. And there is not a single program of the AGC which tried to accede to these channels. The AGC simply never attempted to control the RCS.
After having seen that the AGC could not control the thrust of the main engine, we now see that the AGC could neither control the lateral thrusters of the RCS. With no control of the main engine and the RCS, it made the powered descent impossible. And it also rendered the powered ascent impossible for the very reasons outlined above.
This finding is especially the case since the vertical thrusters were also required to create a counter torque to oppose the growing misalignment torque generated by the shift of the centre of mass as the level of the tanks became lower, which, unlike in the descent, could not be corrected by vectoring the ascent engine.

The inevitable conclusion to be reached is that if the lunar module could neither land on the Moon nor successfully lift off from it, the Moon landings could not have taken place as stated in the published documentation and as shown in the Apollo record.
Xavier Pascal
Aulis Online, October 2021
Further reading
NASA documents used for this study include:
the manual of the lunar module Apollo Operations Handbook (written just before Apollo 15)
The full Source Code of the AGC
Description of the set of instructions of the AGC (AGC programs)
![]()
This article is licensed under
a Creative Commons License
Xavier Pascal is an aerospace engineer and a very experienced IT computer professional specialising in real-time systems. Over the years he has constructed a number of electronic interfaces with digital electronics. Xavier Pascal is sufficiently qualified to read and understand the technical documentation of the technology deployed in the Apollo space project, and his observations of the intentional flaws in the documents form much of the basis of this article.
AULIS Online – Different Thinking